| |
| |
|
|
|
|
|
| |
|
|
|
|
|
| |
|
|
|
QNX
Neutrino RTOS |
|
|
|
|
|
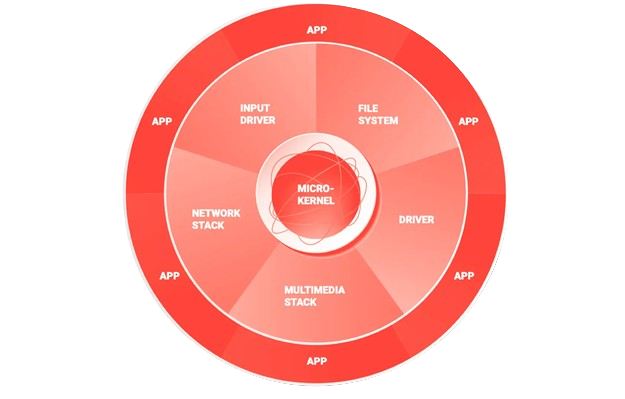
The QNX Neutrino RTOS is a
POSIX-compliant, microkernel-based real-time
operating system designed for embedded systems
requiring high reliability, determinism, and
security. It is the core of QNX SDP and is used
in industrial automation, automotive ECUs,
medical instrumentation, robotics, and IoT
gateways. Supported on ARMv7, ARMv8, x86, and
RISC-V architectures. |
|
|
|
|
|
|
|
|
|
|
|
Key
Features
|
|
|
|
|
|
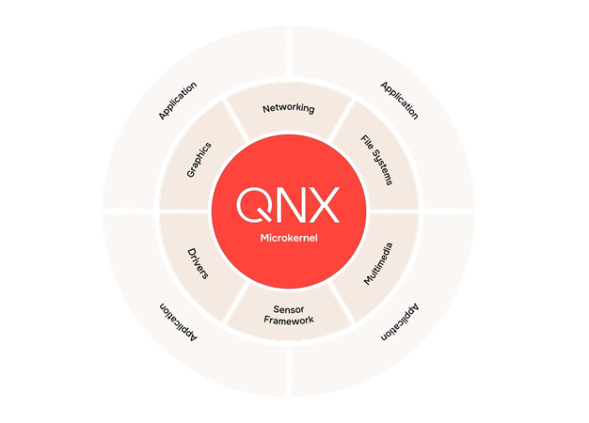
Microkernel
architecture
-
Only essential
services (scheduler, interrupt
manager, IPC) run in kernel space;
all other components (file systems,
network stack) run as user-level
processes.
-
Improves fault
isolation: a crash in a user process
cannot bring down the entire
system.
Modular,
Dynamically-Loadable
-
Loadable modules
for file systems, network protocols,
and device drivers.
-
On-line
patching/upgrades: swap out
user-space drivers without reboot.
Security &
Encryption
-
SELinux-style
access control, encrypted
filesystems (AES-256), TPM/TrustZone
secure boot.
-
SELinux policy
modules, digital signatures for
binaries.
Networking
-
Full IP stack
(IPv4/IPv6, TCP/UDP), CAN, CAN-FD,
EtherCAT, FlexRay, real-time TSN
(Time-Sensitive Networking).
-
High-throughput
“io-sock” stack (up to 10 Gbps) for
industrial Ethernet and wireless
gateways.
|
Hard Real-Time
Determinism
-
Worst-case
interrupt latency < 10 µs on modern
SoCs.
-
Priority-based
preemptive scheduling with adaptive
partitioning guarantees CPU
resources for critical tasks.
POSIX Compliance
& Development Toolchain
-
Supports
pthreads, semaphores, shared memory,
sockets, enabling easy porting of
existing real-time Linux and UNIX
applications.
-
QCC (customized
GCC), Clang/LLVM, and C++17
toolchain, with QNX Momentics IDE
for profiling and debugging.
High
Availability Framework (HAM)
-
Automatic
process monitoring and multi-stage
recovery for mission-critical
applications.
Multiprocessing
& Virtualization Support
-
SMP (symmetric
multiprocessing) on multicore SoCs,
ARM TrustZone, and SMMU support.
-
QNX Hypervisor
integration for mixed-criticality
deployment.
|
|
|
|
Version Highlights
|
|
|
|
|
| |
|
QNX Neutrino RTOS 8.0/8.0.1 (2024) |
QNX Neutrino RTOS 7.1
(2024)
|
-
New Virtual Memory Manager with improved
large-block allocation performance.
-
Enhanced microkernel scheduling callouts,
dynamic processor online/offline, and
Stable status for ARMv8 SMMU modules.
-
Real-time tracing with built-in logging
(slogger2) and system profiler
enhancements.
|
-
Persistent SUP (Publisher/Subscriber)
replaced PPS, support for
high-performance “io-sock” networking,
expanded BSP coverage for ADAS and
industrial boards.
|
|
|
|
|
|
|
Typical Applications
|
|
|
|
|
|
-
Industrial
Automation & Control: PLCs, SCADA
gateways, robotics controllers demanding < 1
ms jitter.
-
Medical Devices:
Infusion pumps, imaging systems with IEC
62304 Class C requirements.
-
Automotive ECUs:
Instrument clusters, advanced driver
assistance, infotainment controllers.
-
Critical
Infrastructure: Power generation,
railway signaling requiring IEC 61508 SIL3
compliance.
|
|
|
|
|
| |
|
|
| |
|
|
|
|
|
| |
|
|
|
QNX Momentics Tool Suite
|
|
|
|
|
| |
QNX Momentics is a comprehensive
integrated development environment (IDE) and
command-line tool suite designed for creating,
debugging, profiling, and tuning applications
targeting QNX Neutrino RTOS. Available for
Linux, Windows, and macOS hosts.
|
|
|
|
|
|
|
|
|
|
|
|
Key Features |
|
|
|
|
|
Eclipse-Based
IDE
-
Project wizards
for quick setup of C/C++, QNX
resource managers, and Qt/QML GUI
apps.
-
Integrated
target management (launch, deploy,
debug) and workspace
synchronization.
-
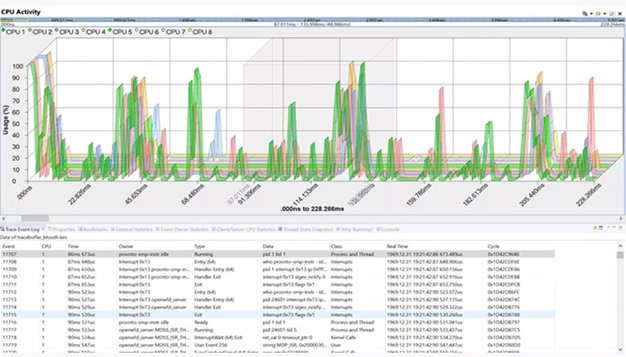
MSystem Profiler
for visualizing CPU, memory, and I/O
usage at microsecond resolution.
Build
Automation & CI/CD
-
Integration with
Jenkins, GitLab CI, and cloud-based
QNX Accelerate for large-scale
parallel builds and tests.
|
QCC Compiler and
Toolchain
-
Clang/LLVM-based
C/C++17 compiler with QNX-specific
optimizations, linkers, archivers.
- Static analysis integration (e.g.,
LDRA) via plugins for MISRA, ISO 26262
compliance.
Profiling &
Analysis
-
CPU Sampling, HW Performance Counters,
thread analysis, worst-case
execution time (WCET) metrics.
-
Power profiling
(QNX Power Profiler) to measure
energy use per code path; ideal for
battery-powered IoT.
|
Advanced
Debugger
-
Source-level
debug, multi-core debugging,
on-target debug and memory
inspection (Trace32, Lauterbach
integrations).
-
Real-time
tracing: collect kernel and
application events with minimal
overhead; view in graphical
timeline.
Extensible via
SDKs & Plugins
-
SDKs for QNX
Sound, ADAS, IVY, and external
toolchains (GCC, LLVM, Vector
tools).
|
|
|
|
|
|
|
Supported Hosts &
System Requirements |
|
|
|
|
| |
- Windows: Windows 10/11 (64-bit), quad-core
CPU, 8 GB RAM, 20 GB disk.
- Linux: Ubuntu 22.04 LTS (64-bit), RHEL 8,
8 GB RAM, 20 GB disk.
- macOS: macOS 13+ (Apple Silicon and
Intel), 8 GB RAM, 20 GB disk.
|
|
| |
|
|
| |
|
|
| |
|
|
|
|
|
| |
|
|
|
QNX
Hypervisor & Virtualization
|
|
|
|
|
| |
QNX Hypervisor 8.0 |
|
| |
|
|
| |
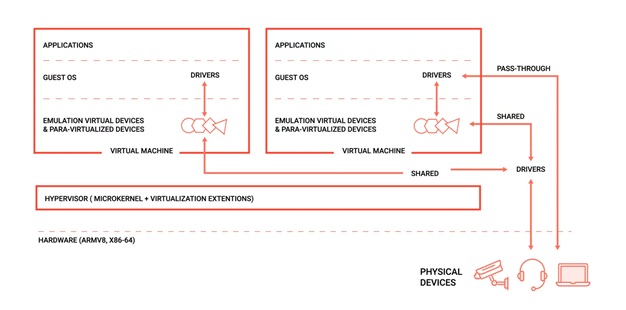
A real-time,
microkernel-based hypervisor that consolidates
multiple heterogeneous operating systems (e.g.,
Linux, Android) on a single SoC with isolation
and priority-based scheduling. Certified for
edge and server-class embedded systems |
|
| |
|
|
|
|
|
| |
|
|
| |
Key Features |
|
| |
|
|
| |
-
Real-Time Scheduling: Baked-in
priority-based scheduling ensures
deterministic execution for RTOS guests.
-
Mixed-Criticality
Isolation: Hardware-level isolation for
safety-critical QNX OS for Safety guest
alongside general-purpose guests.
-
VIRTIO & Custom
Backend Frameworks:
- VIRTIO drivers for paravirtualized I/O
(network, block devices).
-
Custom QNX Advanced Virtualization Frameworks
for GPU sharing, audio, camera, and TSN
networks.
-
Scalability: Supports multicore
ARMv8, x86_64 platforms (e.g., NXP i.MX8,
Intel Apollo Lake).
-
Security & Safety Extensions:
Hardware-assisted isolation via ARM
TrustZone, Intel VT; optional
Safety-certified variant (QNX Hypervisor for
Safety 8.0).
|
|
| |
|
|
| |
|
|
| |
|
|
|
|
|
| |
|
|
|
QNX
Containers |
|
|
|
|
|
QNX Containers is an Open
Container Initiative (OCI)- and Kubernetes-compliant
container runtime engineered on QNX SDP 8.0.
Designed for embedded and IoT endpoints, QNX
Containers enable isolated, secure, and
efficient application deployment, facilitating
DevOps and microservices architectures on
resource-constrained devices. |
|
|
|
|
|
|
|
|
|
|
|
Key
Features
|
|
|
|
|
|
OCI & Kubernetes
Compatibility
-
Leverage Docker
registries and Kubernetes manifests
for seamless container deployment.
-
Supports OCI
image format, containerd, and cri-o
tooling.
Security &
Compliance
-
Adheres to ISO
21434 automotive cybersecurity
requirements.
-
Integrated QNX
SDP 8.0 security features:
capabilities, sandboxed file systems
(AFC), encrypted images.
Mixed-Criticality Support
-
Co-existence with QNX Hypervisor VMs:
run containers alongside
safety-critical VMs on the same
hardware.
|
Lightweight
Microkernel-Based Runtime
-
Uses QNX microkernel isolation and
process-level namespace separation (Cgroups,
Chroot, Seccomp).
-
Minimal memory
footprint (< 2 MB overhead per
container).
Cloud & Edge
DevOps Integration
-
Container images
built on QNX Accelerate can be
tested and deployed on AWS/Azure.
-
Simplified OTA
updates via container image layers.
|
|
|
|
|
|
| |
|
|
| |
|
|
|
|
|
| |
|
|
|
QNX Board
Support Packages (BSPs) |
|
|
|
|
|
QNX BSPs provide
board-specific kernel, drivers, and build
scripts to deploy QNX Neutrino on a wide range
of embedded hardware. Each BSP includes hardware
initialization code, device drivers (Ethernet,
USB, CAN, PCIe, I2C, etc.), bootloader support,
and example projects. |
|
|
|
|
|
Common
BSP Highlights (QNX 8.0)
|
|
|
|
|
|
NXP i.MX 8M Family
BSP
-
Support for
dual/quad ARM Cortex-A53 cores +
Cortex-M4, GPU (Vivante), VPU
(H.264/HEVC).
-
Secure boot (ARM
TrustZone) + Trusted Firmware A
integration.
Intel Atom Ivy
Bridge & Apollo Lake BSP
-
x86_64 support
with Intel Quick Sync Video.
-
AES-NI, SGX, TSN
Ethernet controllers.
Texas
Instruments TI TDA2x & AM57x BSP
-
TDA2Px
specialized VLIW DSP and EVE cores
for sensor fusion.
-
HDMI, CAN, ADC,
Timer, GPIO, PRU support.
|
Renesas R-Car
H3/H3M4 BSP
- 6 × Cortex-A57,
2 × Cortex-A53 + 2 × Cortex-M Sch
core.
-
GPU (PowerVR),
image S/B CI pipeline, audio I2S,
MIPI CSI, LVDS.
NVIDIA Jetson
Family (TX2, Xavier NX) BSP
-
CUDA, Jetpack integration, 4K decode,
AI inference libraries.
-
V4L2 camera drivers, Jetson TX2
TX1/I2C, SPI support.
|
|
|
|
|
|
| |
|
|
|
|
|
|
|
| |
|
|
|
|
|